CMD
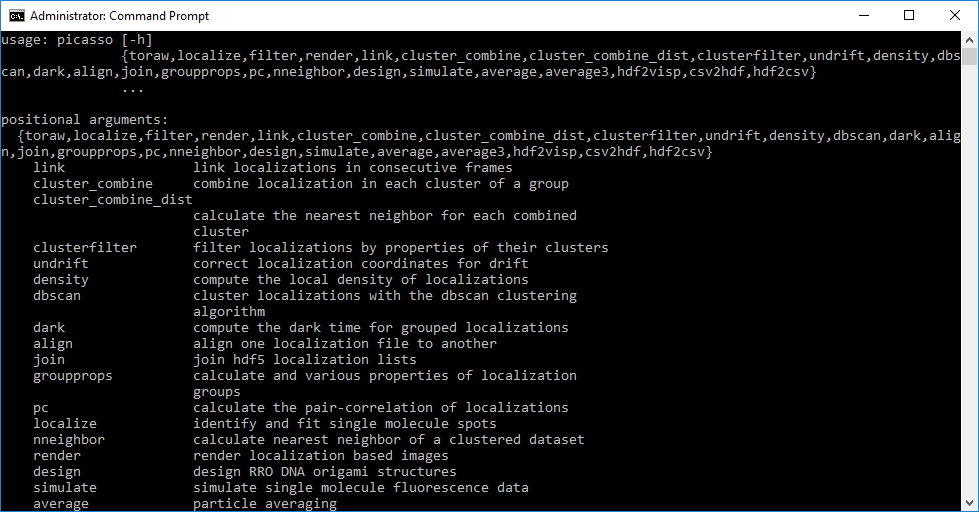
Here is a list of command-line commands that can be used with picasso. Each command can be run by typing picasso command args in a terminal or command prompt, where command is one of the commands listed below and args are the respective arguments for that command. For more information, type picasso -h or picasso command -h for specific commands.
If you wish to open a module (GUI), simply type picasso module_name, for example, picasso render.
localize
Reconstructing images via command line is possible. Type: picasso localize args within an environment where Picasso is installed. Type picasso localize to open the GUI module.
Batch process a folder
To batch process a folder simply type the folder name (or drag in drop into the console), e.g. picasso localize foldername. Picasso will analyze the folder and process all *.ome.tif in files in the folder. If the files have consecutive names (e.g., File.ome.tif, File_1.ome.tif, File_2.ome.tif), they will be treated as one.
If you want to analyze *.raw files, Picasso will check whether a *.raw file has a corresponding *.yaml file. If none is found, you can enter the specifications for each raw file. It is possible to use the same specifications for all *.raw files in that run.
Adding additional arguments
The reconstruction parameters can be specified by adding respective arguments. If they are not specified the default values are chosen.
'-b', '--box-side-length', type=int, default=7, help='box side length'
'-a', '--fit-method', choices=["mle", "lq", "lq-gpu", "lq-3d", "lq-gpu-3d", "mle-3d", "avg"], default='mle', help='fitting method'
'-g', '--gradient', type=int, default=5000, help='minimum net gradient'
'-d', '--drift', type=int, default=1000, help='segmentation size for subsequent RCC, 0 to deactivate'
'-r', '--roi', type=int, nargs=4, default=None, help='ROI (y_min, x_min, y_max, x_max) in camera pixels'
'-fb', '--frame-bounds', type=int, nargs=2, default=None, help='frame bounds (start_frame, end_frame), 0-indexed'
'-bl', '--baseline', type=int, default=0, help='camera baseline'
'-s', '--sensitivity', type=float, default=1, help='camera sensitivity'
'-ga', '--gain', type=int, default=1, help='camera gain'
'-qe', '--qe', type=float, default=1, help='camera quantum efficiency'
'-px', '--pixelsize', type=int, default=130, help='pixel size in nm'
'-mf', '--mf', type=float, default=0, help='magnification factor (3D only)'
'-zc', '--zc', type=str, default='', help='path to 3D calibration file (3D only)'
'-sf', '--suffix', type=str, default='', help='suffix to add to output files'
'-db', '--database', action='store_true', help='add the run to the local database'
Note 1: Localize will automatically try to perform an RCC drift correction on the dataset. As this will not always work with the default settings after an unsuccessful attempt, the program will continue with the next file. If the drift correction succeeds, another hdf5 file with the drift corrected locs will be created.
Note 2: Make sure to set the camera settings correctly; otherwise photon counts are wrong plus the MLE might have problems.
Note 3: If you select one of the 3D algorithms (lq-3d, lq-gpu-3d or mle-3d) you must supply both the magnification factor (-mf) and the path to the 3D calibration file (-zc). If either is omitted, the program will prompt you for it interactively.
Example
This example shows the batch process of a folder, with movie ome.tifs that are supposed to be reconstructed and drift corrected with the lq algorithm and a min. net gradient of 4000.
picasso localize foldername -a lq -g 4000
render
Start the render module (GUI) or render from command line. With no arguments the GUI opens; with a files path one or more localization files are rendered to image files.
'-o', '--oversampling', type=float, default=1.0, help='the number of super-resolution pixels per camera pixel'
'-b', '--blur-method', choices=['none', 'convolve', 'gaussian'], default='convolve'
'-w', '--min-blur-width', type=float, default=0.0, help='minimum blur width if blur is applied'
'--vmin', type=float, default=0.0, help='minimum colormap level in range 0-100 or absolute value'
'--vmax', type=float, default=20.0, help='maximum colormap level in range 0-100 or absolute value'
'--scaling', choices=['yes', 'no'], default='yes', help='if scaling, the colormap value is relative in the range 0-100'
'-c', '--cmap', choices=['viridis', 'inferno', 'plasma', 'magma', 'hot', 'gray'], help='the colormap to be applied'
'-s', '--silent', action='store_true', help='do not open the rendered image file'
filter
Start the filter module (GUI).
design
Start the design module (GUI).
simulate
Start the simulation module (GUI).
average
Start the 2D averaging module (GUI).
server
Start the Picasso server (web browser GUI).
spinna
Start the SPINNA module (GUI) or run batch analysis from command line. Without -p the GUI opens; passing -p path/to/parameters.csv runs batch analysis from a parameters CSV file (see the SPINNA documentation for the expected CSV structure).
'-p', '--parameters', type=str, help='.csv file containing the parameters for spinna batch analysis'
'-a', '--asynch', action='store_false', help='do not perform fitting asynchronously (multiprocessing)'
'-b', '--bootstrap', action='store_true', help='perform bootstrapping'
'-v', '--verbose', action='store_true', help='display progress bar for each row'
average3
Start the 3D averaging module (GUI) (to be deprecated in 1.0).
csv2hdf
Convert csv files (ThunderSTORM) to .hdf5. Type picasso csv2hdf filepath -p pixelsize (-p/--pixelsize in nm is required). Note that the following columns need to be present:
frame, x_nm, y_nm, sigma_nm, intensity_photon, offset_photon, uncertainty_xy_nm for 2D files
frame, x_nm, y_nm, z_nm, sigma1_nm, sigma2_nm, intensity_photon, offset_photon, uncertainty_xy_nm for 3D files
hdf2csv
Convert hdf5 files to .csv files (keeps columns names).
hdf2ts
Convert hdf5 files to ThunderSTORM .csv files (adapts column names).
hdf2imagej
Convert hdf5 files to ImageJ .txt files.
hdf2nis
Convert hdf5 files to NIS Elements .txt files.
hdf2chimera
Convert hdf5 files to Chimera .xyz files.
hdf2visp
Convert hdf5 files to ViSP .3d files.
join
Combine two hdf5 localization files. Type picasso join file1 file2. A new joined file will be created. Note that the frame information of consecutive files is reindexed, i.e., frame 1 now can contain localizations from file 1 and file 2. Therefore, do not perform kinetic analysis and drift correction on joined files. Pass -k/--keepindex to keep the original frame numbers instead of reindexing.
link
Link localizations in consecutive frames.
'-d', '--distance', type=float, default=1.0, help='maximum distance between localizations to consider them the same binding event (camera pixels)'
'-t', '--tolerance', type=int, default=1, help='maximum dark time between localizations to still consider them the same binding event'
clusterfilter
Filter localizations by properties of their clusters.
'-c', '--clusterfile', type=str, help='a hdf5 clusterfile'
'-p', '--parameter', type=str, help='parameter to be filtered'
'--minval', type=float, help='lower boundary'
'--maxval', type=float, help='upper boundary'
undrift
Correct localization coordinates for drift with RCC.
'-s', '--segmentation', type=float, default=1000, help='the number of frames to be combined for one temporal segment'
'-f', '--fromfile', type=str, help='apply drift from specified file instead of computing it'
'-d', '--display', action='store_true', help='display estimated drift'
aim
Correct localization coordinates for drift with AIM.
'-s', '--segmentation', type=float, default=100, help='the number of frames to be combined for one temporal segment'
'-i', '--intersectdist', type=float, default=20/130, help='max. distance (camera pixels) between localizations in consecutive segments to be considered as intersecting'
'-r', '--roiradius', type=float, default=60/130, help='max. drift (camera pixels) between two consecutive segments'
undrift_fiducials
Correct localization coordinates for drift using fiducial markers (automatically picked). Takes one or more hdf5 localization files as positional arguments.
density
Compute the local density of localizations. Takes positional files and radius (float): the maximal distance between two localizations to be considered local.
dbscan
Cluster localizations with the dbscan clustering algorithm. Positional arguments:
files one or more hdf5 localization files
radius (float) maximal distance (camera pixels) between two localizations to be considered local
density (int) minimum local density for localizations to be assigned to a cluster
pixelsize (int) camera pixel size in nm (required for 3D localizations only)
hdbscan
Cluster localizations with the hdbscan clustering algorithm. Positional arguments:
files one or more hdf5 localization files
min_cluster (int) smallest size grouping that is considered a cluster
min_samples (int) the higher, the more points are considered noise
pixelsize (int) camera pixel size in nm (required for 3D localizations only)
smlm_cluster
Cluster localizations with the custom SMLM clustering algorithm.
The algorithm finds localizations with the most neighbors within a specified radius and finds clusters based on such “local maxima”.
Positional arguments:
files one or more hdf5 localization files
radius (float) clustering radius (in camera pixels)
min_locs (int) minimum number of localizations in a cluster
pixelsize (int) camera pixel size in nm (required for 3D localizations only)
basic_fa (bool) whether to perform basic frame analysis (sticking event removal)
radius_z (float) clustering radius in axial direction (MUST BE SET FOR 3D!)
g5m
Run Gaussian Mixture Modeling with Modifications (G5M) for Molecular Mapping on clustered localizations. For details see https://doi.org/10.1038/s41467-026-70198-5.
The positional files argument is a unix-style path to one or more clustered .hdf5 files, or a folder in which all .hdf5 files will be analyzed. If omitted, the GUI is launched.
'-ml', '--min-locs', type=int, default=10, help='min. number of locs per molecule'
'-lph', '--loc-prec-handle', type=str, default='local', help="loc. precision handle, either 'local' or 'abs'"
'--min-sigma', type=float, default=0.8, help='minimum sigma factor/value'
'--max-sigma', type=float, default=1.5, help='maximum sigma factor/value'
'--max-rounds', type=int, default=3, help='max. rounds without BIC improvement to terminate'
'--bootstrap-sem', action='store_true', help='bootstrap to estimate SEM of molecule positions'
'-c', '--calibration', type=str, default='', help='path to calibration file (3D only)'
'-p', '--postprocess', action='store_false', help='do not postprocess results to remove sticking events and low-quality fits'
'--max-locs', type=int, default=100000, help='maximum number of localizations to process per cluster; useful for excluding fiducials'
'-a', '--asynch', action='store_false', help='do not perform fitting asynchronously (multiprocessing)'
dark
Compute the dark time for grouped localizations.
align
Align one localization file to antoher via RCC.
Type picasso align file1 file2 [...] (two or more files). Pass -d/--display to display the correlation.
groupprops
Calculate the properties of localization groups
pc
Calculate the pair-correlation of localizations.
'-b', '--binsize', type=float, default=0.1, help='the bin size (camera pixels)'
'-r', '--rmax', type=float, default=10, help='the maximum distance to calculate the pair-correlation'
nneighbor
Calculate the nearest neighbor within a clustered dataset.
cluster_combine
Combines the localizations in each cluster of a group (to be deprecated in 1.0).
cluster_combine_dist
Calculate the nearest neighbor for each combined cluster (to be deprecated in 1.0).