localize
Localize allows performing super-resolution reconstruction of image stacks. For spot detection, a gradient-based approach is used. For Fitting, the following algorithms are implemented:
MLE, integrated Gaussian (based on Smith et al., 2010.)
LQ, Gaussian (least squares). On Windows with a CUDA-capable GPU, an accelerated variant is available via Gpufit, which is vendored into Picasso (
picasso/ext/pygpufit/) and works automatically — no extra install step.Average of ROI (finds summed intensity of spots)
Please note: Picasso Localize supports file formats:
.ome.tif, including BigTiff (as of Picasso 0.9.10),NDTiffStackwith extension.tif,.raw,.ims(supported only on Windows),.nd2,.stk(MetaMorph Stack, as of Picasso 0.10.0).
There is limited support for .tiff files.
Identification and fitting of single-molecule spots
In
Picasso: Localize, open a movie file by dragging the file into the window or by selectingFile>Open movie. If the movie is split into multiple μManager .tif files, open only the first file. Picasso will automatically detect the remaining files according to their file names. Similarly, for consecutive .stk files (e.g.name_001.stk,name_002.stk, …), open the first file of the desired range and Picasso will automatically include all subsequent files with a higher numeric suffix. When opening a .raw file, a dialog will appear for file specifications. When opening an IMS file it should be displayed immediately in the localize window. When opening an IMS file with multiple channels, a dialog window will appear allowing you to select the channel that should be loaded. You can navigate through the file using the arrow keys on your keyboard. The current frame is displayed in the lower right corner.Adjust the image contrast (select
View>Contrast) so that the single-molecule spots are clearly visible.To adjust spot identification and fit parameters, open the
Parametersdialog (selectAnalyze>Parameters).In the
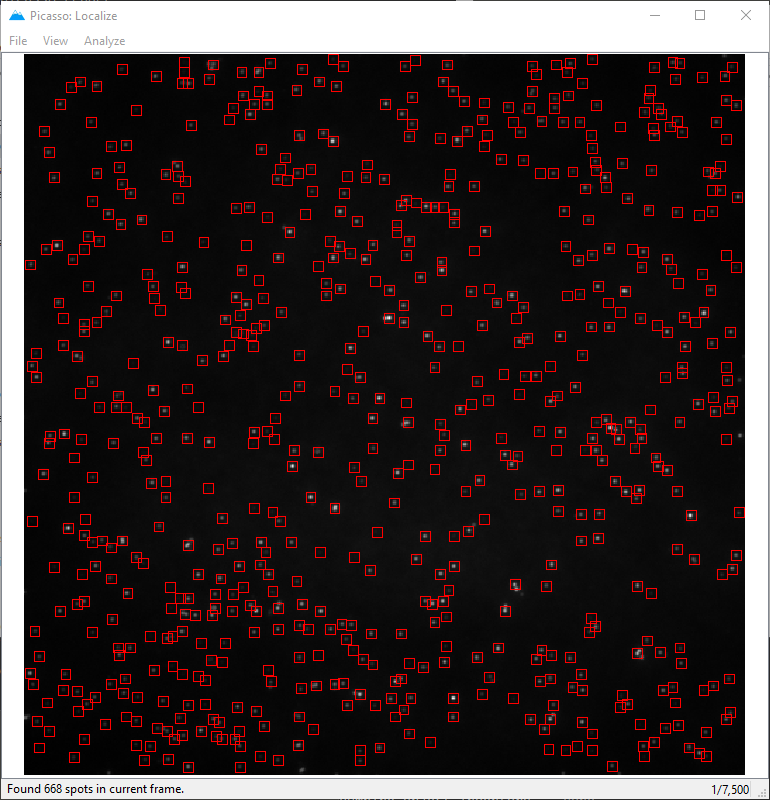
Identificationgroup, set theBox side lengthto the rounded integer value of 6 × σ + 1, where σ is the standard deviation of the PSF. In an optimized microscope setup, σ is one pixel, and the respectiveBox side lengthshould be set to 7. The value ofMin. net gradientspecifies a minimum threshold above which spots should be considered for fitting. The net gradient value of a spot is roughly proportional to its intensity, independent of its local background. By checkingPreview, the spots identified with the current settings will be marked in the displayed frame. AdjustMin. net gradientto a value at which only spots are detected (no background).(Optional) The
Identificationgroup contains an extra box to input the region of interest (ROI) that is to be considered during identification (units in camera pixels). Alternatively, the ROI can be selected with clicking on the display with the left mouse button and dragging the displayed rectangle.In the
Photon conversiongroup, adjustEM Gain,Baseline,SensitivityandQuantum Efficiencyaccording to your camera specifications and the experimental conditions. SetEM Gainto 1 for conventional output amplification.Baselineis the average dark camera count.Sensitivityis the conversion factor (electrons per analog-to-digital (A/D) count).Quantum Efficiencyis not used since version 0.6.0 and is kept for backward compatibility only. These parameters are critical to converting camera counts to photons correctly. The quality of the upcoming maximum likelihood fit strongly depends on a Poisson photon noise model, and thus on the absolute photon count. For simulated data, generated withPicasso: Simulate, set the parameters as follows:EM Gain= 1,Baseline= 0,Sensitivity= 1.From the menu bar, select
Analyze>Localize (Identify & Fit)to start spot identification and fitting in all movie frames. The status of this computation is displayed in the window’s status bar. After completion, the fit results will be saved in a new file in the same folder as the movie, in which the filename is the base name of the movie file with the extension_locs.hdf5. Furthermore, information about the movie and analysis procedure will be saved in an accompanying file with the extension_locs.yaml; this file can be inspected using a text editor.
Extra features
File>Save identifications: Saves the current set of identifications (frame, x, y, net gradient and identification id, where applicable) to an HDF5 file with a companion YAML metadata file. By default the suggested filename is<movie_base>_identifications.hdf5. The accompanying YAML stores the original movie metadata together with theBox SizeandMin. Net Gradientused at the time of saving, so the parameters can be restored when the identifications are loaded again.File>Load identifications: Loads identifications previously saved withSave identifications. The identifications are clipped to the current movie’s bounds (using the currentBox Size) and the identification parameters stored in the YAML sidecar (Box Size,Min. Net Gradient) are restored. As with the other identification loading actions, changing any identification parameter (box size, min. net gradient, etc.) will reset the loaded identifications, and ``Analyze`` > ``Fit`` should be used (rather than ``Localize (Identify & Fit)``) to fit them without resetting.File>Load picks as identifications: Allows the user to load circular picks (from Picasso Render) as identifications. Additionally, the drift correction file (.txt) can be loaded to adjust the positions of the identifications throughout acquisition. The current box size will be used to make the identification, however, min. net gradient will not be applied to the identifications. Note that changing any of the identification parameters (box size, min. net gradient, etc) will reset the loaded identifications. Furthermore, use ``Analyze`` > ``Fit``, rather than ``Analyze`` > ``Localize (Identify & Fit)``, to fit the loaded identifications without reseting them.File>Load locs as identifications: Similar to loading picks as identifications (see above) but uses localizations as input. The user is asked to provide the number of frames around localizations to be used for the identifications, i.e., how many frames before and after the frame of the localization should be included in the identifications. For each localization, 2 * n_frames + 1 identifications will be assigned, thus if localizations are close together the identifications may overlap. Note that changing any of the identification parameters (box size, min. net gradient, etc) will reset the loaded identifications. Furthermore, use ``Analyze`` > ``Fit``, rather than ``Analyze`` > ``Localize (Identify & Fit)``, to fit the loaded identifications without reseting them.File>Save spots: Cuts out and saves the identified spots (NxBxB array, with N spots and B being the box side length). The spots can be saved as a .npy file or as a .tif file.
Camera Config
Picasso can remember default cameras and will use saved camera parameters. In order to use camera configs, create a file named config.yaml in the picasso folder. See below on how to locate it.
To start with a template, modify config_template.yaml that can be found in the folder by default. Picasso will compare the entries with Micro-Manager-Metadata and match the sensitivity values. If no matching entries can be found (e.g., if the file was not created with Micro-Manager) the config file will still be used to create a dropdown menu to select the different categories. The camera config can also be used to define a default camera that will always be used. Indentions are used for definitions.
One click installer (Windows)
If you downloaded an .exe Picasso file from the release page:
Navigate to the installation folder, by default, it’s
C:/Picasso. Before version 0.8.3, the default location wasC:/Program Files/Picasso.Go to the folder
_internal/picasso. Before version 0.9.6, the folder was simplypicasso.Add your config file there.
One click installer (macOS)
If you downloaded a .dmg Picasso file from the release page:
Navigate to your Applications folder and right-click on the picasso app, then select “Show Package Contents”.
Go to the folder
Contents/Frameworks/picasso.Add your config file there.
PyPI
If you installed Picasso using pip install picassosr:
Activate your conda environment where
picassosris installed by typingconda activate YOUR_ENVIRONMENT.To find the location of the package, type
pip show picassosrand look for the line starting withLocation:.Navigate to this location and go to
picasso.Add your config file there.
GitHub
If you cloned the GitHub repository, you can add plugins by following these steps:
- Find the directory where you cloned the GitHub repository with Picasso.
- Go to picasso/picasso/.
- Copy the config file to this folder.
Example: Default Camera
Cameras:
Camera1:
Baseline: 100
Sensitivity: 0.5
Quantum Efficiency: 1.0
If there is only one camera entry, picasso will create a dropdown menu that has always selected this camera.
Gain
If the string Gain Property Name can be found in the config, picasso will search for a value for this key in the Micro-Manager metadata and match if found.
Sensitivity
If the string Sensitivity Categories can be found in the config, picasso will create a dropdown menu for each entry, and if the property can be located in the Micro-Manager Metadata, it will be automatically set.
Cameras:
Camera1:
Baseline: 100
Quantum Efficiency:
525: 0.5
Sensitivity Categories:
- PixelReadoutRate
- Sensitivity/DynamicRange
Sensitivity:
540 MHz - fastest readout:
12-bit (high well capacity): 7.18
12-bit (low noise): 0.29
16-bit (low noise & high well capacity): 0.46
200 MHz - lowest noise:
12-bit (high well capacity): 7.0
12-bit (low noise): 0.26
16-bit (low noise & high well capacity): 0.45
Here, two Sensitivity Categories are given PixelReadoutRate and Sensitivity/DynamicRange. In the upper dropdown menu, one now will be able to choose from 540 MHz - fastest readout and
200 MHz - lowest noise. Within 540 MHz it will be 12-bit (high well capacity): 7.18, 12-bit (low noise): 0.29 and 16-bit (low noise & high well capacity): 0.46. Accordingly for the 200 MHz entry. The dropdown menus can be further nested, e.g., when considering Gain modes:
Sensitivity:
Electron Multiplying:
17.000 MHz:
Gain 1: 15.9
Gain 2: 9.34
Gain 3: 5.32
Quantum Efficiency
This feature is not used since Picasso 0.6.0. It is kept for backward compatibility only.
Several Cameras
Cameras:
Camera1:
Camera2:
Camera3:
Once there are several cameras present, Picasso will select the camera who’s name matches the Micro-Manager Metadata. If no camera is found, the first one is automatically selected. In the dropdown menu, the configured cameras are displayed in alphabetical order.
Camera Priorities
CameraPriority:
- Camera3
- Camera1
If many cameras are configured, the dropdown can become cluttered. For that reason, the config can additionally include a “CameraPriority” field. It describes a list of camera names which must match names in the “Cameras” field. The listed cameras are then displayed on top of the dropdown menu while the non-listed cameras are shown below in alphabetical order.
3D-Calibration
Theory
3D Calibration is performed by an adapted version of Huang et al., 2008.
Calibrating z
After entering the step size, picasso will calculate the mean and the variance for sigma_x and sigma_y for each z position. Localizations that are not within one standard deviation are discarded. A six-degree polynomial is fitted to the mean values of x and y.
mean_sx = cx[6]z0 + cx[5]z1 .. + cx[0]z6
mean_sy = cy[6]z0 + cy[5]z1 .. + cy[0]z6
The calibration coefficients are stored in the YAML file and contain the parameters of cx and cy. The first entry being c[0], the last being c[6].
Fitting z
For each localization, sigma_x and sigma_y is determined. Similar to the Science paper, the following equation is used to minimize the Distance D: D = (sx0.5 - wx0.5)^2 + (sy0.5 - wy0.5)^2 with w being c[6]z0 +
c[5]z1 .. + c[0]z6.
Incorporating calibrations in config file
The calibration depends on the microscope, camera, and emission wavelength used. It can become tedious to navigate to and select the correct calibration yaml file. Therefore, the config file can include a field to map camera and emission wavelength to path of the z calibration yaml file:
z-calibrations:
Camera1:
525: /path/to/Camera1-GFP-zcalibration.yaml
595: /path/to/Camera1-Cy3B-zcalibration.yaml
If the camera names and emission wavelengths match the settings in Micromanager, the correct z-calibration is automatically loaded. In any case an alternative calibration yaml file can be loaded by button.